I graduated from Boston University School of Engineering in the Spring of 2016. For my senior design capstone project I was fortunate to work with NEIDL. This amazing facility works on level 4 biohazard material and requires an incredibly stringent containment system, essentially a building within a building. This level of safety meant a few things:
- It is very time consuming to enter/exit the internal lab room.
- Training to enter/exit the space is time consuming and extensive.
Our problem was to develop a system that would make it easier for people to interact with the lab space. The solution we developed was a remotely operated robotic platform.
Mechanical Design
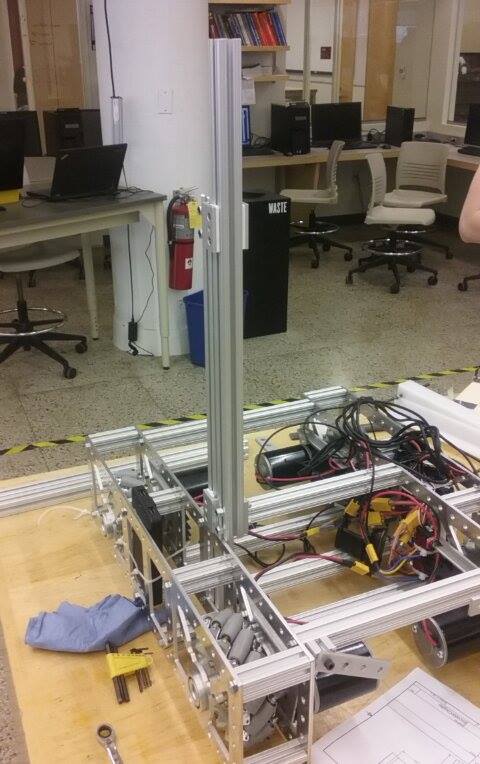
The mechanical design was built around the concept of modularity and is highly configurable. The reason for this was because one of the design requirements was future adaptation by other teams. In order to achieve this extensive use of 80/20 aluminum extrusions were utilized. These extrusions enable an incredible flexible mounting surface while also providing great strength and rigidity.
As can be seen in the pictures above the robotic platform consists of two mirrored drive pods. Each drive pods contains 4 identical aluminum plates. Again the idea behind a simple, consistent design enables not only symmetrical mounting features but also easy maintenance/repair. I CNC’d these pieces after configuring the tool paths in GibbsCam.
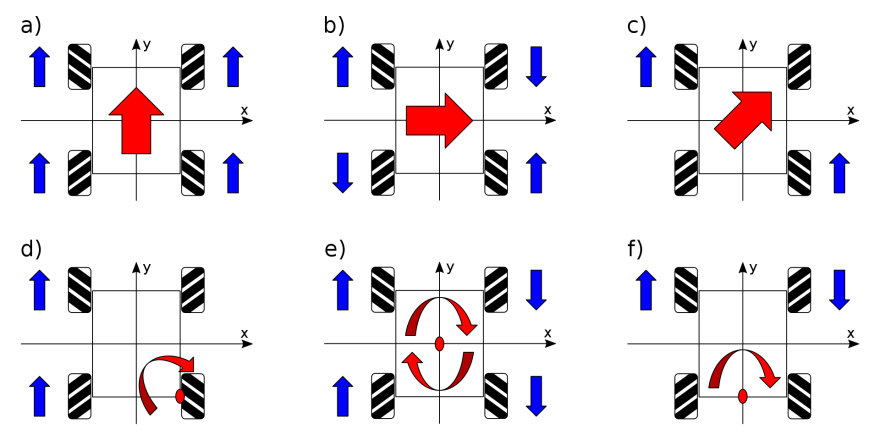
The drive pods employ mecanum wheels. A fascinating type of wheel that when configured enables the robot to move in any direction.
Electrical Design
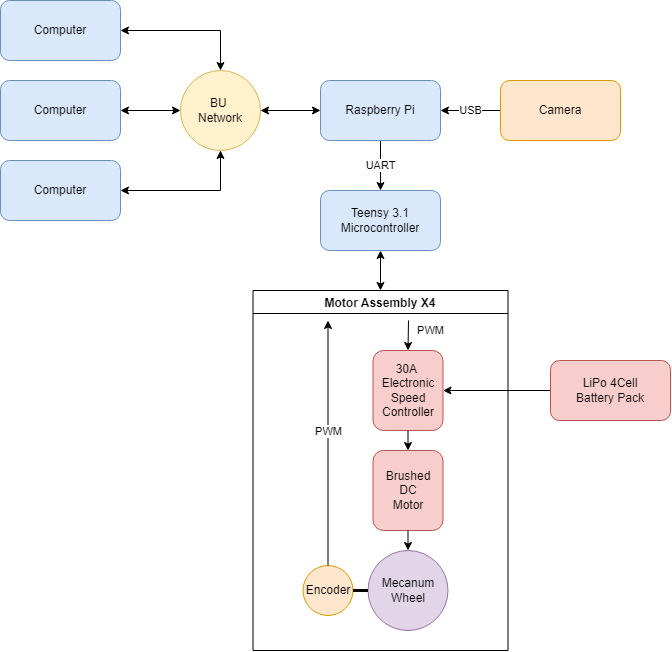
In addition to the mechanical design I also did the electrical and software engineering. In order for real time processing a microcontroller was utilized to control the wheels and feedback loop. This microcontroller was then in turn controlled by a raspberry pi. The raspberry pi could be controlled remotely by another computer on the BU network and enabled me to write multiple python scripts to manipulate the chassis. In addition to providing remote capabilities, the raspberry pi also enabled a vision system in the form of a USB webcam.
The overall latency of the system was good enough that realtime control could be easily demonstrated.
Things I could do better
After submitting and handing off this project to our NEIDL host I’ve had a few years to think about what I could have done.
- The bearing utilized where open faced flanged ball-bearings. It would have been much better to have used angular closed flanged bearings because of that possible severe side loads from the drivetrain system.
- The mecanum wheel shafts did not have pre-load. This was a beginner’s mistake and it resulted in not only a lot of noise, but also vibrations. Mecanum wheels aren’t known to give the smoothest ride, but adding some pre-load in the form of belleville washers would have made things smoother and ultimately more rigid.
- The chassis was fully open. Again this results in a lot of possible dirt/filth entrapment. Adding some kind of vacuum molded plastic enclosure would have kept things nice and clean. Better yet if you could fully waterproof the chassis you could clean it with a hose.
- Cable management was a nightmare. Adding some sort of conduit or terminal block would have made it much easier to manage.
