ATLAS stands for Animal Tracking Linked Autonomous Satellites and was 100% a backronym for a project submitted to NASA’s Next Generation Animal Tracking Ideation Challenge in December of 2018. The competition was to come up with feasible ideas to supplement ARGOS satellite system utilizing cubesatellite technology.
Below you’ll find a variety of info about my submission to the competition as well as the PDF that I finally submitted. You’ll also find a series of videos regarding the orbital coverage given varying altitudes and number of satellites.
Although I didn’t win the competition, I was honored to be awarded an honorable mention. Checkout the competition description and results here: https://www.herox.com/animaltracking/updates
Overall I had a lot of fun with this project. Given a very loose set of requirements I was able to let my imagination run with different possibilities. I also got to try my hand at writing python for orbital simulation which was new to me. Even got to brush off the old LaTex skills.





White Paper
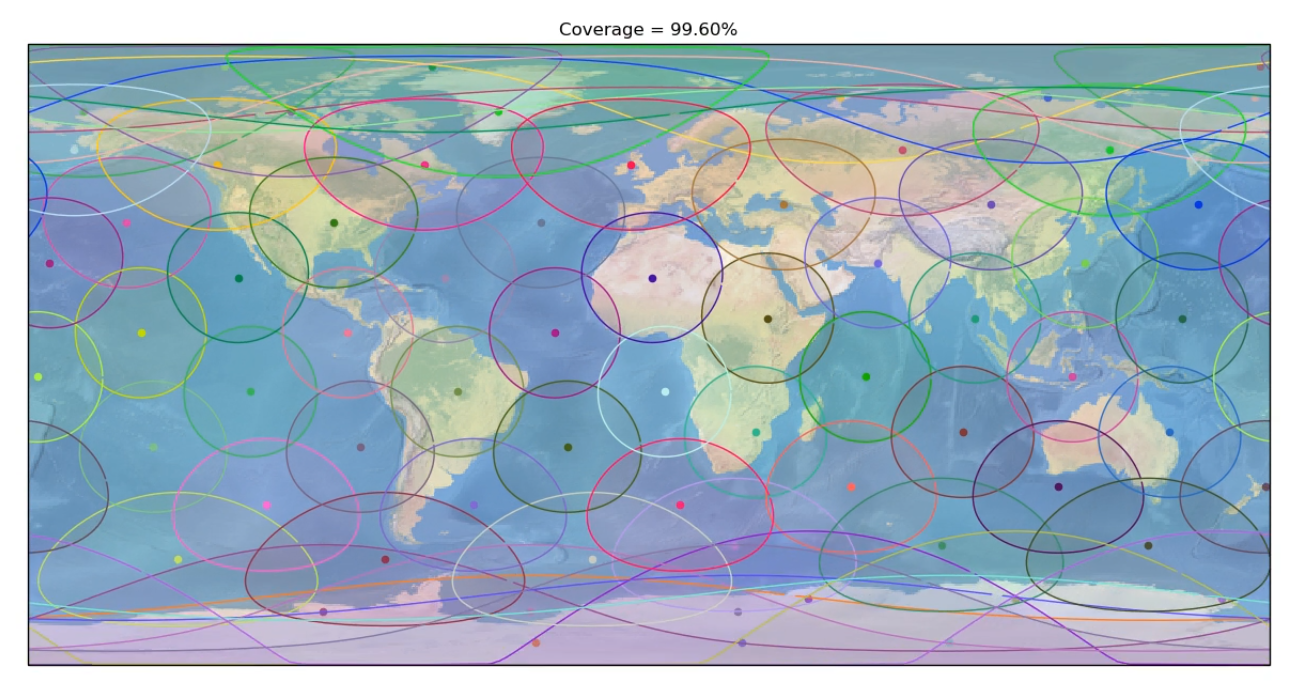
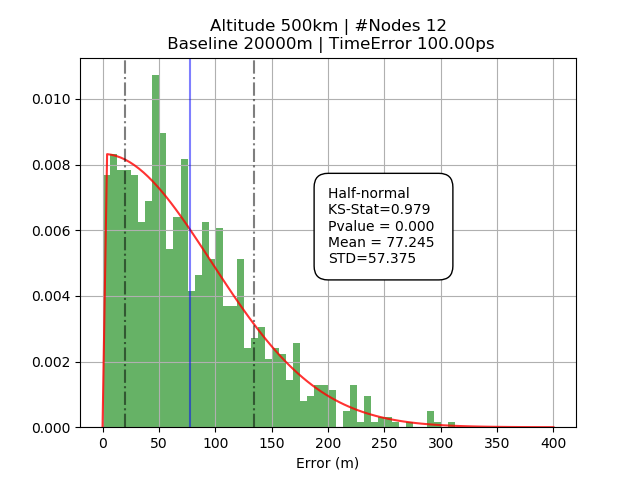
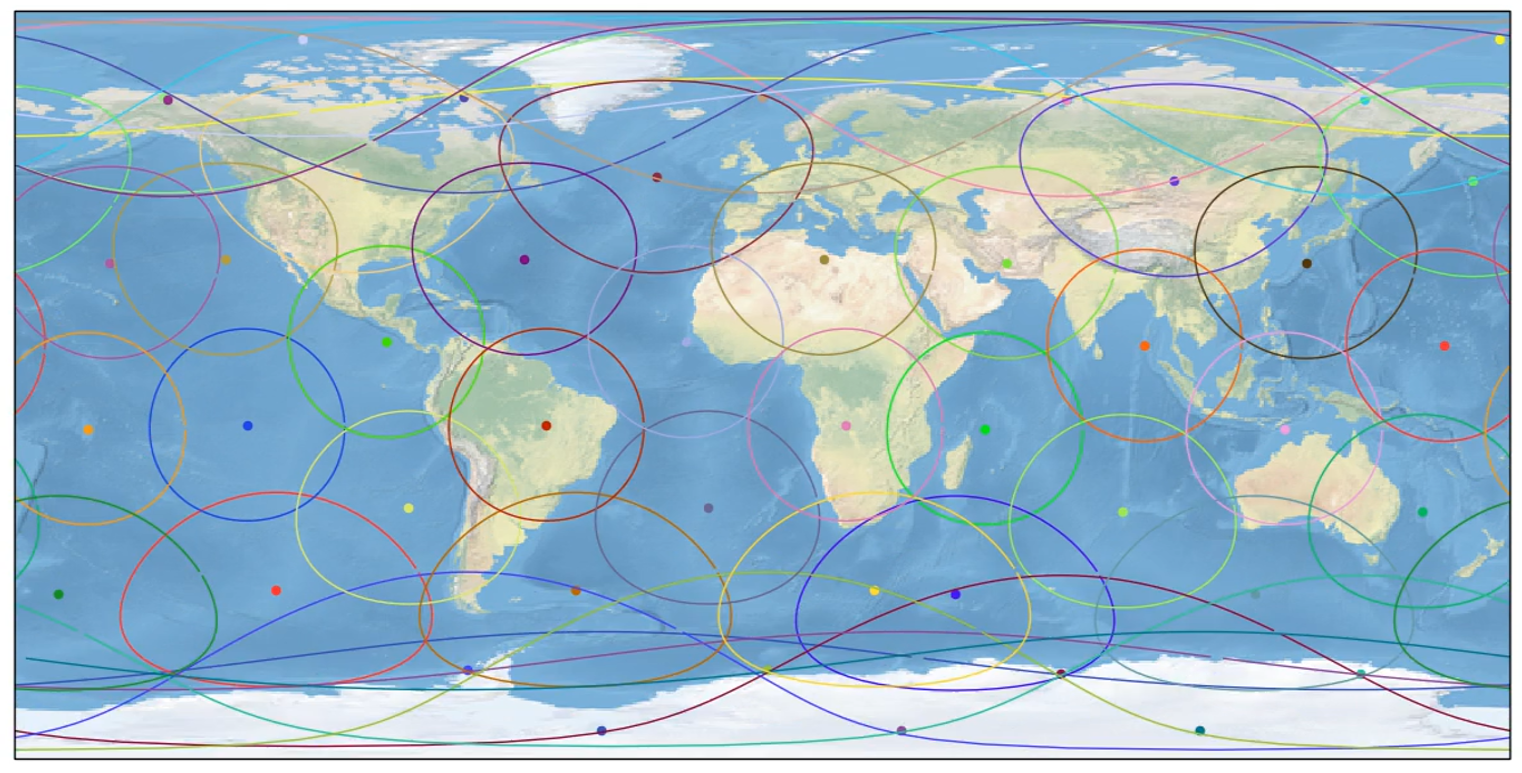
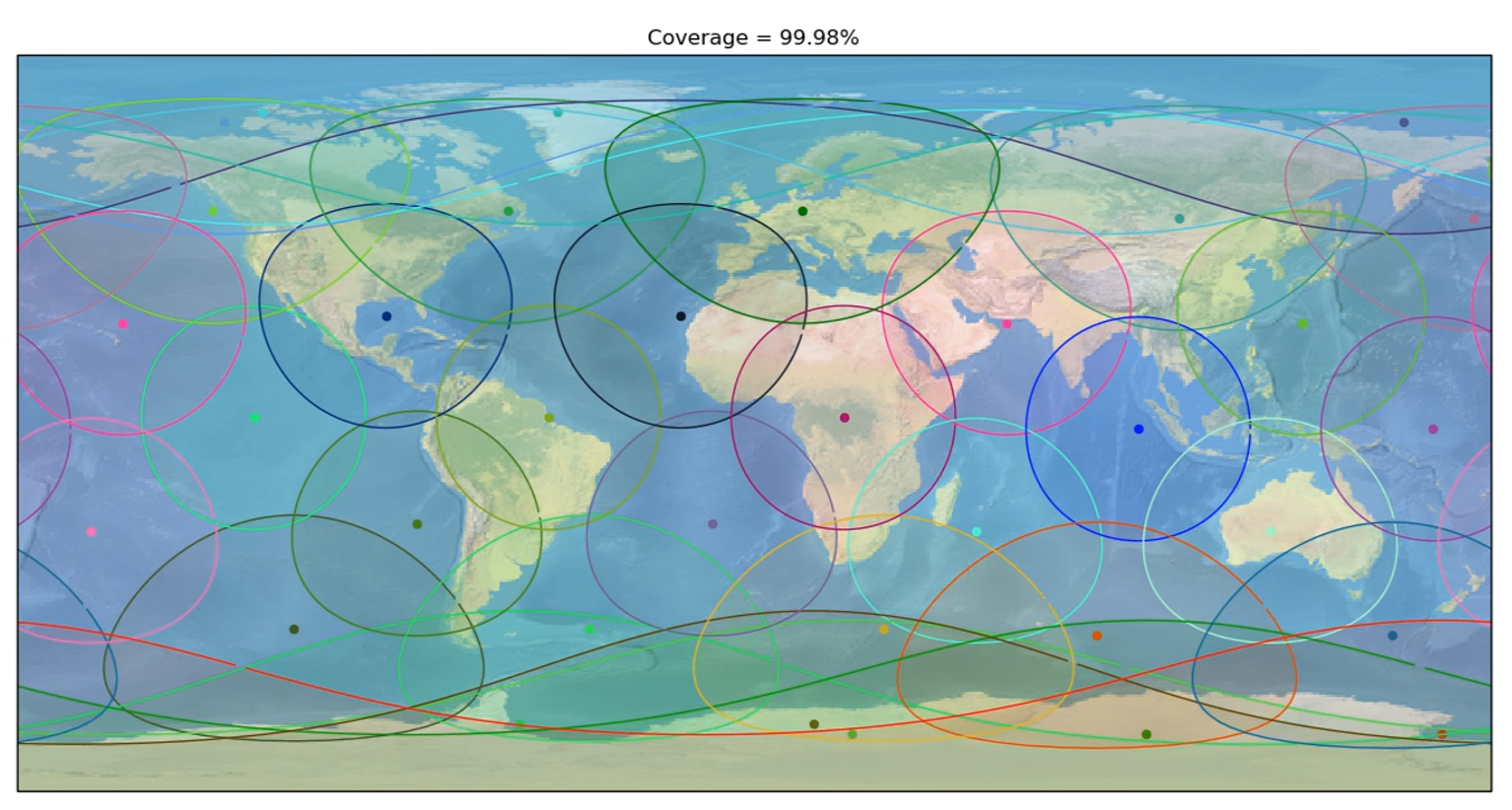
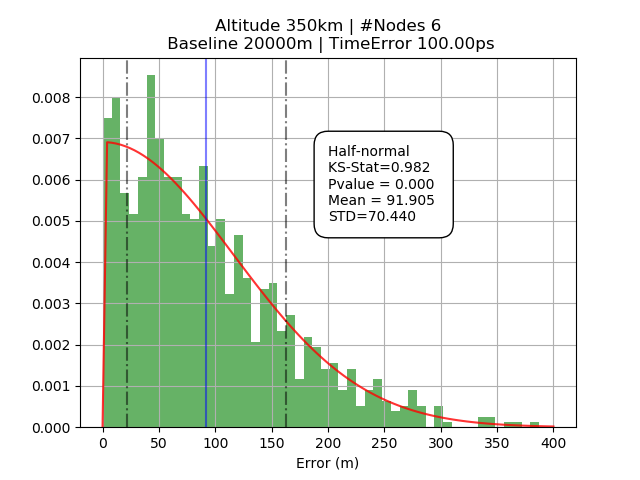
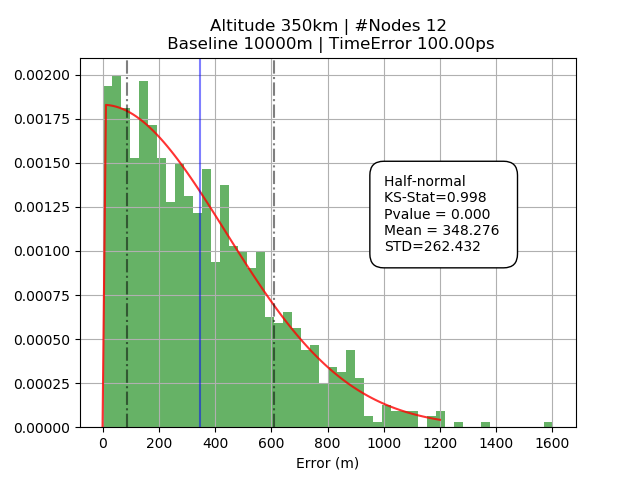
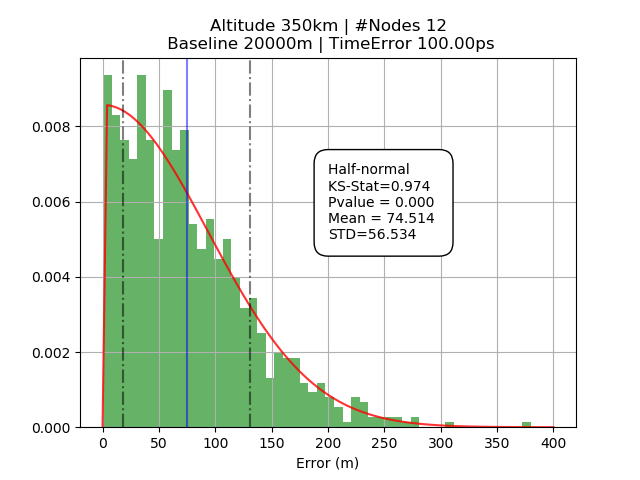
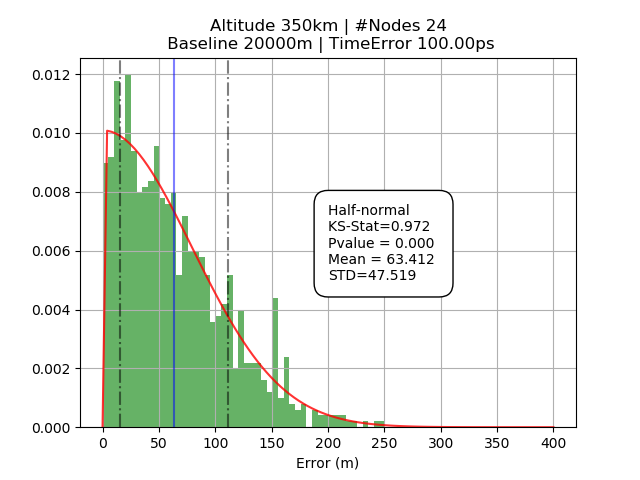
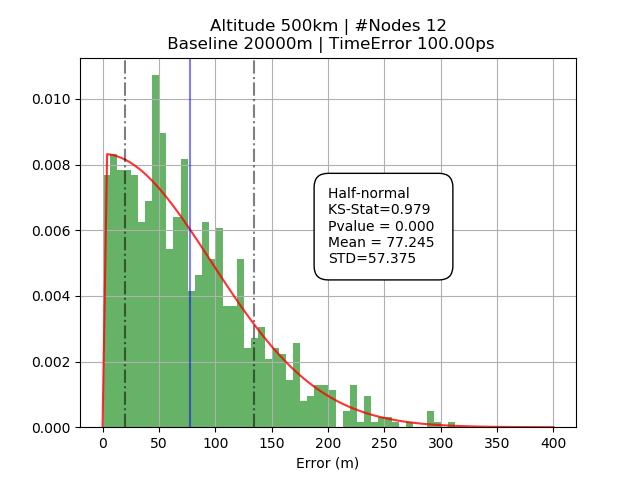
Simulation
Novel Concepts
The idea behind cubesatellites have been around since the late 90s, but I thought that I had incorporated some clever ideas into this project. More detail is given in the paper but below I put a brief synopsis together.
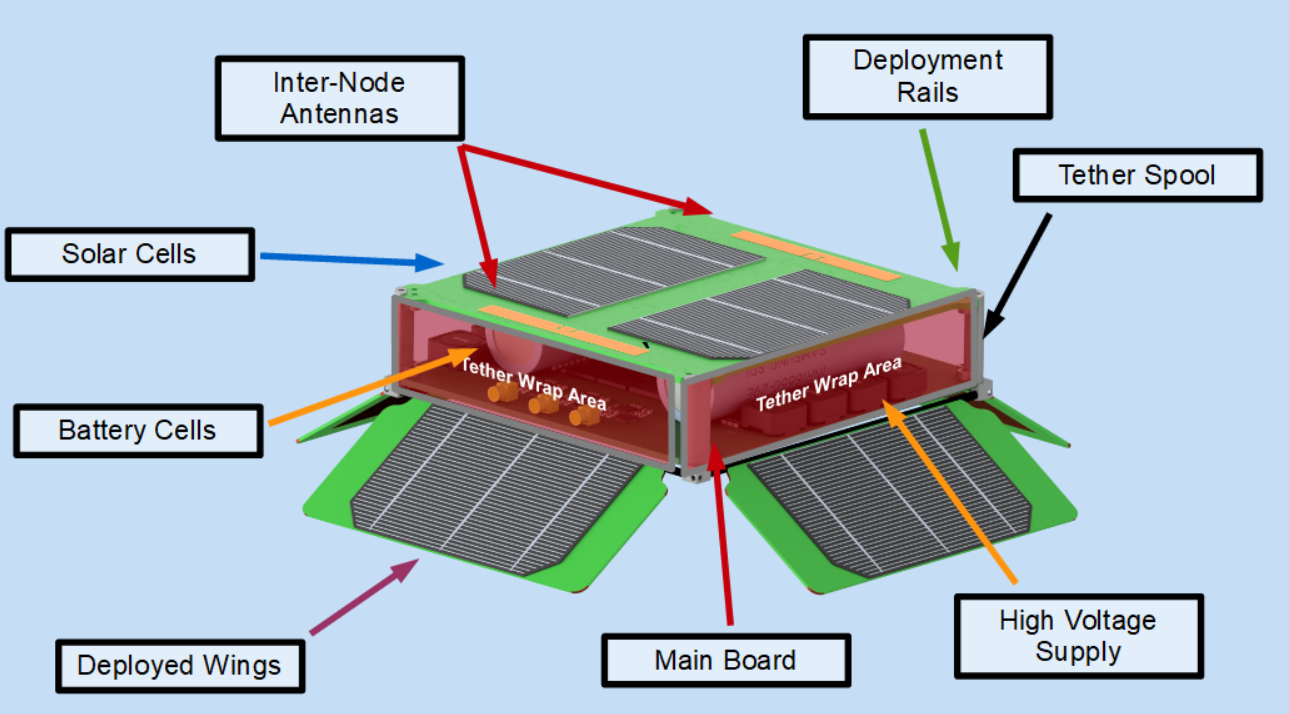
Tether Propulsion
Whenever you read about a propellant free propulsion system red flags should be going off in your head. Fortunately for everyone though there is one that’s real! It’s called an Electrodynamic Tether. This paper gives a great overview of the principles behind these thrusters.
In essence an Electrodynamic Tether utilizes the fact that Earth has a magnetic field and that in low earth orbit the electron density is significant. What this means is that you can use energy to push/pull against Earth’s magnetic field to either raise/lower your orbital altitude.
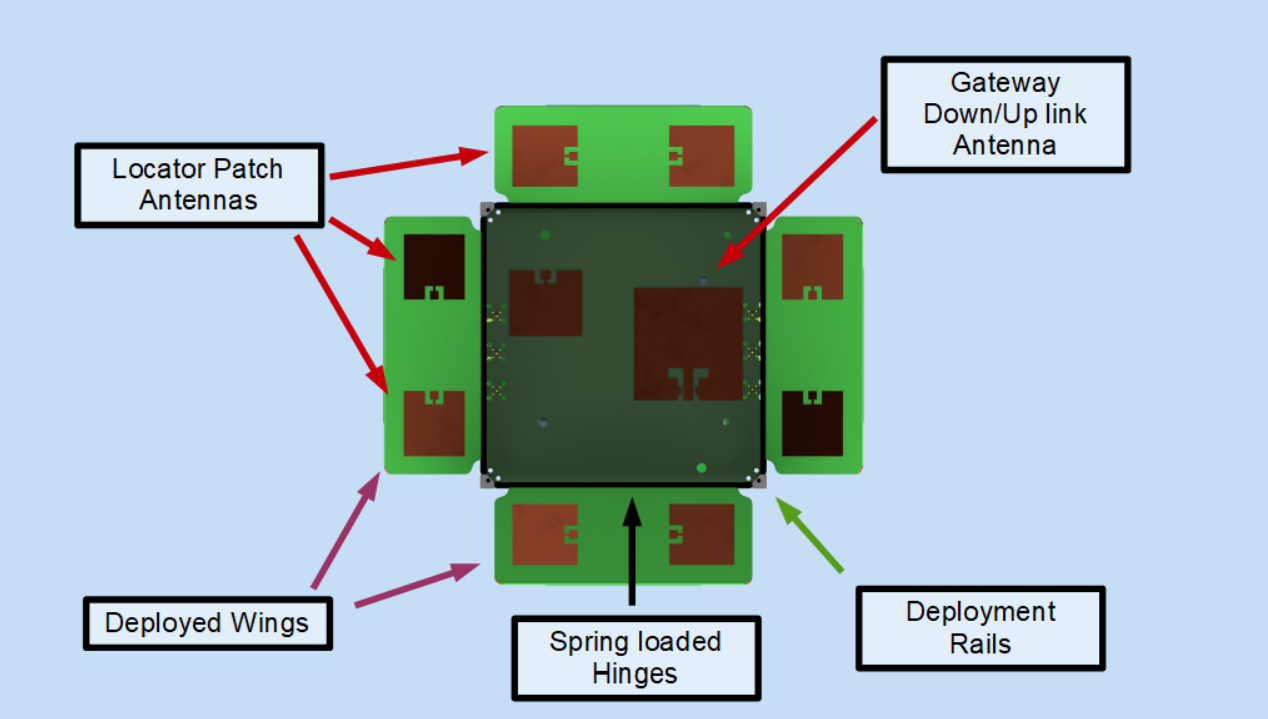
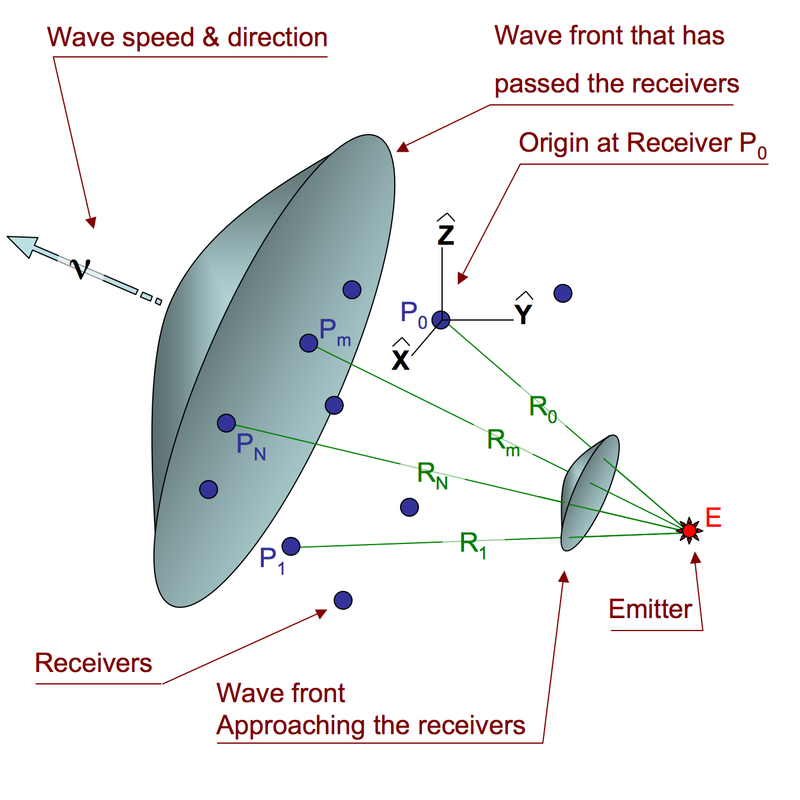
Picosecond synchronization
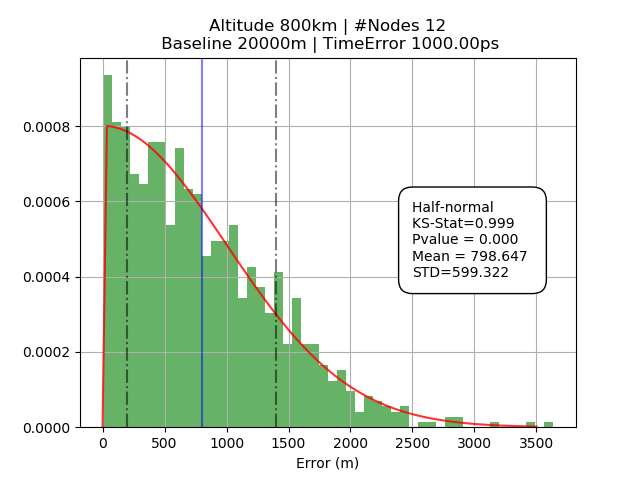
The competition required a system that could locate a small transmitter on earth. Think small tags on birds and sea turtles. ATLAS achieves this capability by precisely measuring the time of arrival of the signal between nodes that are spatially separated. This thesis does a great job describing how this works.


Things I could have done better
Thinking back on this project there are a few things I would have done a little differently. In no particular order:
- Include sources within my paper and keep better documentation for future reference. This was silly of me to not include, but time crunches make you cut corners. This was a big one I shouldn’t have cut and I valuable lesson learned.
- Rather than advocating precision timing by PLL on a CW carrier – it would have made more sense to distribute the timing signal via the tether.
- I should have put more effort in showing the feasibility of spooling the tether. A small section showing math would have made sense.
- Not much effort was shown on how the link budget would have closed – that’s pretty important considering the data collection requirement.
- Rather than using passive patch antennas, maybe a phased array approach would have made sense.
- The localization was predicated on a single signal source transmission. It would have made a lot of sense and could have reduced the localization error a lot if it was multiple transmissions equally spaced apart. Imagine 10 transmission spaced 10-50ms apart averaging out the errors.
